![]() 판다르View 2
판다르View 2
포인트 클라우드
시각화 소프트웨어
사용자 설명서
판다르View 2포인트 클라우드 시각화 소프트웨어
www.hesaitech.com
 헤사이 위챗
헤사이 위챗
http://weixin.qq.com/r/Fzns9IXEl9jorcGX92wF
문서 버전: PV2-en-230710
이 매뉴얼에 대하여
■ 본 설명서의 사용
- 처음 사용하기 전에 이 사용 설명서를 반드시 읽고 제품을 작동할 때 여기에 있는 지침을 따르십시오. 지침을 준수하지 않으면 제품 손상, 재산 손실, 부상 및/또는 보증 위반이 발생할 수 있습니다.
- 이 사용 설명서에는 제품 인증에 대한 정보가 포함되어 있지 않습니다. 제품 밑판의 인증 마크를 확인하시고 해당 인증 경고문을 읽어보시기 바랍니다.
- 이 LiDAR 제품을 귀하의 제품에 통합하는 경우 귀하의 제품을 사용하려는 사용자에게 이 사용 설명서(또는 이 사용 설명서에 액세스할 수 있는 수단)를 제공해야 합니다.
- 이 LiDAR 제품은 최종 제품의 구성 요소로 사용됩니다. 관련 표준에 따라 최종 제품에서 평가되어야 합니다.
■ 이 매뉴얼에 대한 액세스
최신 버전을 얻으려면:
- Hesai의 공식 다운로드 페이지를 방문하십시오. web대지: https://www.hesaitech.com/en/download
- 또는 Hesai 영업 담당자에게 문의하십시오.
- 또는 Hesai의 기술 지원 팀에 문의하십시오. service@hesaitech.com
■ 기술지원
이 사용 설명서에서 질문이 해결되지 않은 경우 다음 연락처로 문의하십시오.
service@hesaitech.com
www.hesaitech.com/en/support
https://github.com/HesaiTechnology (해당 GitHub 프로젝트에 질문을 남겨주세요.)
■ 전설
![]() 경고: 제품을 안전하고 올바르게 사용하기 위해 따라야 하는 지침.
경고: 제품을 안전하고 올바르게 사용하기 위해 따라야 하는 지침.
![]() 참고사항: 도움이 될 수 있는 추가 정보.
참고사항: 도움이 될 수 있는 추가 정보.
소개
판다르View 2는 Hesai LiDAR의 포인트 클라우드 데이터를 기록하고 표시하는 XNUMX세대 소프트웨어이며 다음에서 사용할 수 있습니다.
- 64비트 윈도우 10
- 우분투 16.04/18.04/20.04
![]() 컴퓨터가 AMD 그래픽 카드를 사용하고 Ubuntu-20.04에서 실행되는 경우 AMD 공식 사이트에서 Ubuntu-20.04를 지원하는 그래픽 드라이버를 다운로드하십시오. web대지. 추가 지침은 Hesai 기술 지원팀에 문의하세요.
컴퓨터가 AMD 그래픽 카드를 사용하고 Ubuntu-20.04에서 실행되는 경우 AMD 공식 사이트에서 Ubuntu-20.04를 지원하는 그래픽 드라이버를 다운로드하십시오. web대지. 추가 지침은 Hesai 기술 지원팀에 문의하세요.
이 매뉴얼에서는 Pandar에 대해 설명합니다.View 2.0.101. 지원되는 제품 모델:
| 판다40 판다40M 팬더40P 판다64 |
팬더128E3X | 판다르QT QT128C2X |
PandarXT PandarXT-16 XT32M2X |
AT128E2X | FT120 |
설치
설치 다운로드 file헤사이의 공식에서 왔습니다 web사이트를 방문하거나 기술 지원에 문의하세요. www.hesaitech.com/en/download
| 체계 | 설치 Files |
| 윈도우 | 판다르View_Release_Win64_V2.x.xx.msi |
| 우분투 | 판다르View_Release_Ubuntu_V2.x.xx.bin |
![]() 우분투에서는 Pandar를 실행하세요.View.sh의 file ASCII 문자만 포함하는 경로입니다.
우분투에서는 Pandar를 실행하세요.View.sh의 file ASCII 문자만 포함하는 경로입니다.
소프트웨어 인터페이스는 아래와 같이 XNUMX개의 섹션으로 구분됩니다(세부 사항은 다를 수 있음).
메뉴 표시줄의 "정보"에는 소프트웨어 버전이 표시됩니다.
라이브 포인트 클라우드 확인
PC에서 데이터를 받으려면 PC의 IP 주소를 192.168.1.100으로, 서브넷 마스크를 255.255.255.0으로 설정하세요.
| 우분투의 경우 : | Windows의 경우: |
| 터미널에 다음 ifconfig 명령을 입력합니다. ~$ sudo ifconfig enp0s20f0u2 192.168.1.100 (enp0s20f0u2를 로컬 이더넷 포트 이름으로 교체) |
네트워크 공유 센터를 열고 "이더넷"을 클릭하십시오. "이더넷 상태" 상자에서 "속성"을 클릭하십시오. "인터넷 프로토콜 버전 4(TCP/IPv4)"를 두 번 클릭합니다. IP 주소를 192.168.1.100으로 구성하고 서브넷 마스크를 255.255.255.0으로 구성합니다. |
3.1 사이버보안 구성
Cybersecurity를 지원하는 제품 모델의 경우, ![]() (사이버 보안)이 도구 모음에 나타납니다.
(사이버 보안)이 도구 모음에 나타납니다.
사용자는 세 가지 모드 중 하나를 선택할 수 있습니다.
■ TLS 모드
TLS 모드에서는 PandarView 2는 LiDAR 장치의 보정을 자동으로 검색합니다. filePTCS(TLS를 통한 PTC) 명령을 사용합니다.
| 보안 페이지 web 제어 | 사이버 보안 마스터 스위치를 켜세요. |
| PTC 연결에 대해 TLS를 선택합니다. | |
| 판다르View 2 | PTC 연결에 대해 TLS를 선택합니다. |
| "CA CRT" 버튼을 클릭하고 file Hesai의 CA 인증서 체인 경로(Hesai_Ca_Chain.crt) |
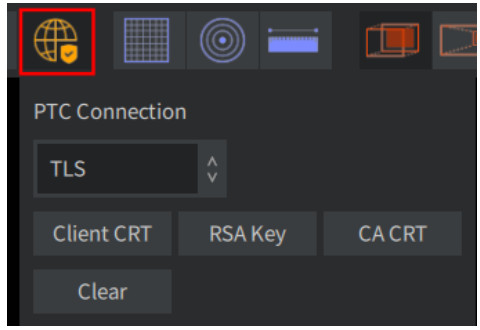
■ mTLS 모드
mTLS 모드에서는 PandarView 2는 LiDAR 장치의 보정을 자동으로 검색합니다. filePTCS 명령을 사용합니다.
| 보안 페이지 web 제어 | 사이버 보안 마스터 스위치를 켜세요. |
| PTC 연결을 위해 mTLS를 선택합니다. 사용자 CA 인증서 체인을 업로드합니다. | |
| 판다르View 2 | PTC 연결을 위해 mTLS를 선택합니다. |
| "CA CRT" 버튼을 클릭하세요. 지정하다 file Hesai CA 인증서 체인(Hesai_Ca_Chain.crt)의 경로입니다. | |
| "클라이언트 CRT" 버튼을 클릭하세요. 지정하다 file 사용자 최종 엔터티 인증서의 경로입니다. | |
| "RSA 키" 버튼을 클릭하세요. 지정하다 file 사용자 개인 키의 경로(사용자 최종 엔터티 인증서에 해당) |
![]() "지우기" 버튼은 지정된 항목을 제거합니다. file CA CRT, 클라이언트 CRT 및 RSA 키에 대한 경로입니다.
"지우기" 버튼은 지정된 항목을 제거합니다. file CA CRT, 클라이언트 CRT 및 RSA 키에 대한 경로입니다.
■ 사이버보안 꺼짐
이 모드에서는 판다르가View 2는 LiDAR 장치의 보정을 자동으로 검색합니다. filePTC 명령을 사용합니다.
| 보안 페이지 web 제어 | 사이버 보안 마스터 스위치 끄기 |
| 판다르View 2 | PTC 연결을 위해 비 TLS 선택 |
3.2 실시간 데이터 수신
- 툴바 :
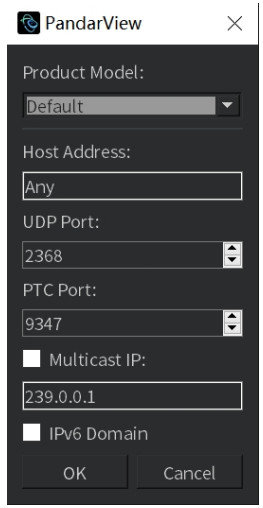
 (듣기 넷)
(듣기 넷) - 팝업 대화 상자에서:
| 제품 모델 | 기본 |
| 호스트 주소 | 어느 |
| UDP 포트 | 설정 페이지의 "Lidar 대상 포트"와 동일해야 합니다. web 제어. 기본적으로는 2368입니다. |
| PTC 포트 | PTC 명령을 전송하는 데 사용됩니다. 기본적으로 9347입니다. |
| 멀티캐스트 IP | 멀티캐스트 모드에서는 확인란을 선택하고 멀티캐스트 그룹을 지정합니다. |
| IPv6 도메인 | 특정 제품 모델에서만 지원됩니다. |
![]() 실시간 데이터를 수신하는 동안:
실시간 데이터를 수신하는 동안:
- 사용자는 각도 보정을 내보낼 수 있습니다. file 그리고 발사시간 수정 file, 섹션 5.1(포인트 클라우드 수정)을 참조하세요.
 (라이브 스트리밍) 콘솔의 버튼을 사용하면 라이브 데이터의 최소 지연 스트리밍이 가능합니다.
(라이브 스트리밍) 콘솔의 버튼을 사용하면 라이브 데이터의 최소 지연 스트리밍이 가능합니다.
![]()
3.3 실시간 데이터 기록
딸깍 하는 소리 ![]() (기록)을 콘솔에서 지정하고 file 예배 규칙서. .pcap 녹음을 시작하려면 "저장"을 클릭하세요. file.
(기록)을 콘솔에서 지정하고 file 예배 규칙서. .pcap 녹음을 시작하려면 "저장"을 클릭하세요. file.
![]() .pcap 이름을 지정할 때 fileUbuntu에서는 다음을 포함합니다. file이름 확장자(.pcap).
.pcap 이름을 지정할 때 fileUbuntu에서는 다음을 포함합니다. file이름 확장자(.pcap).
포인트 클라우드 재생
4.1 .PCAP 열기 File
- 딸깍 하는 소리
 (열다 File) 도구 모음에서 .pcap을 선택합니다. file 팝업창에서.
(열다 File) 도구 모음에서 .pcap을 선택합니다. file 팝업창에서.
또는 .pcap을 드래그하세요. file 판다르로View 2. - 로딩이 완료되면 포인트 클라우드 트랙이 콘솔에 나타납니다.

![]() 노트
노트
- tcpdump pcap 형식만 지원합니다.
- 실시간 데이터를 수신하거나 새 .pcap을 열 때 한 번에 하나의 포인트 클라우드 트랙만 지원합니다. file을 클릭하면 이전 트랙이 자동으로 삭제됩니다.
- 대형 .pcap file로드하는 데 시간이 걸릴 수 있습니다. 로딩 중 클릭 (라이브 스트리밍) 포인트 클라우드 데이터를 한 번에 재생합니다.
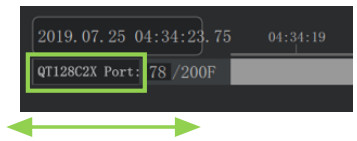
- LiDAR 제품 모델과 포트번호가 전부 표시되지 않을 경우 마우스 휠을 스크롤해주세요.
4.2 재생 제어 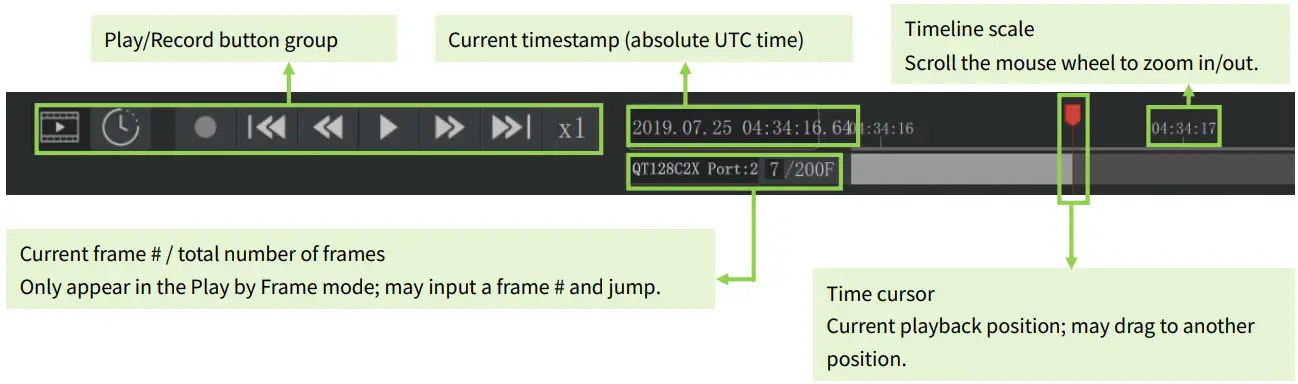
| 단추 | 설명 |
 |
왼쪽: 프레임 단위로 재생(기본값) 오른쪽: 시간 단위로 재생 |
 |
시작 또는 끝으로 이동 file |
 |
왼쪽: 되감기 속도 조정(1x, 1/2x, 1/4x, 1/8x, …, 1/64x) 오른쪽: 앞으로 감기 속도 조정(1x, 2x, 4x, 8x, …, 64x) |
 |
왼쪽: 로드 후 file, 재생하려면 클릭하세요. 오른쪽: 게임을 하는 동안 file, 일시중지하려면 클릭하세요. |
 |
현재 속도를 표시합니다 |
| 로드하는 동안 file, 한 번에 재생하려면 클릭하세요. (로딩이 완료되면 이 버튼은 사라집니다.) 라이브 데이터를 수신할 때 클릭하면 지연 시간을 최소화하여 스트리밍할 수 있습니다. |
수정 및 구성
라이브 포인트 클라우드를 확인하거나 기록된 포인트 클라우드를 재생할 때 수정 file및 구성 files를 사용할 수 있습니다.
5.1 포인트 클라우드 수정
| 각도 보정 | 방위각 및 고도 데이터를 수정합니다. Lidar 사용자 매뉴얼의 섹션 1.3(채널 배포)을 참조하세요. |
| 화재 시간 수정 | 특정 제품 모델의 경우: 각 채널의 발사 시간에 따라 포인트 클라우드 데이터의 방위각을 수정합니다. |
| 거리 보정 | 특정 제품 모델의 경우: 거리 데이터를 수정합니다. |
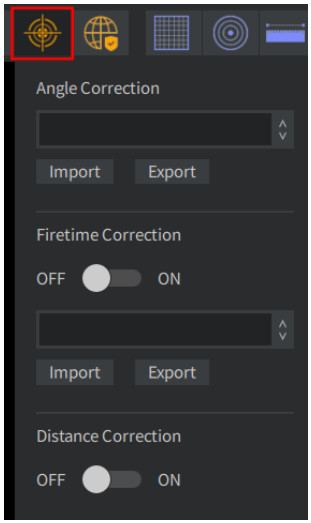
딸깍 하는 소리 ![]() (수정) 도구 모음에서:
(수정) 도구 모음에서:
| 교정 유형 | 설명 |
| 각도 보정 | 라이브 포인트 클라우드를 확인하는 경우: • 판다르View 2 자동으로 수정 사항을 검색합니다. file 이 LiDAR 장치의. 기록된 포인트 클라우드를 재생할 때: • 판다르View 2 일반 수정 사항을 자동으로 업로드합니다. file 이 제품 모델의 경우. • 최상의 표시를 위해 '가져오기'를 클릭하고 수정 사항을 선택하세요. file 이 LiDAR 장치의. |
| 화재 시간 수정 | QT128C2X: • 라이브 포인트 클라우드 확인 시 : PandarView 2 자동으로 수정 사항을 검색합니다. file 이 라이더 장치의; ON으로 전환하고 수정을 시작합니다. • 기록된 포인트 클라우드를 재생할 때: PandarView 2 일반 수정 사항을 자동으로 업로드합니다. file 이 제품 모델의 경우; ON으로 전환하고 수정을 시작합니다. 기타 제품 모델: • ON으로 전환하고 '가져오기'를 클릭한 후 수정 사항을 선택하세요. file 이 LiDAR 장치의. • LiDAR 장치의 수정이 있는 경우 file 로컬에서는 사용할 수 없습니다. ON으로 전환하고 일반 수정을 선택하세요. file 드롭다운 메뉴에서 이 제품 모델에 대한 정보를 확인하세요. |
| 거리 보정 | ON으로 전환합니다. |
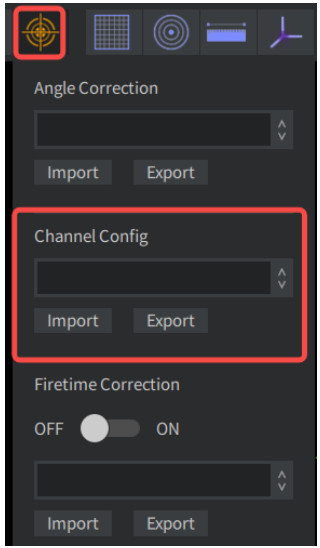
5.2 채널 구성
채널 구성 file LiDAR의 사용 가능한 모든 채널에서 하위 집합을 선택하고, 포인트 클라우드 데이터 패킷의 블록 수를 정의하고, 각 블록에 저장할 채널을 지정합니다.
QT128C2X에만 사용 가능:
- 라이브 포인트 클라우드를 확인하는 경우: PandarView 2는 자동으로 채널 구성을 검색합니다. file 이 LiDAR 장치의.
- 기록된 포인트 클라우드를 재생하는 경우: 클릭
 (수정) 툴바의 채널 구성 섹션에서 "가져오기"를 클릭하고 채널 구성을 선택합니다. file 이 LiDAR 장치의.
(수정) 툴바의 채널 구성 섹션에서 "가져오기"를 클릭하고 채널 구성을 선택합니다. file 이 LiDAR 장치의.
5.3 File 수입 및 수출
File 수입
- 라이브 포인트 클라우드를 확인할 때 "내보내기" 버튼을 사용하여 수정 또는 구성을 다운로드할 수 있습니다. file이 LiDAR 장치의 일부입니다.
- 이것들의 이름을 지을 때 fileUbuntu에서는 다음을 포함해야 합니다. file이름 확장자(각도 수정을 위한 .dat) fileAT 제품군의 s, 기타 제품군의 경우 .csv).
File 내보내다
- 가져온 수정 또는 구성 file드롭다운 메뉴 하단에 가 추가됩니다.
- 더 이상 필요하지 않은 경우 files, 다음 경로에서 삭제할 수 있습니다(Pandar를 다시 시작한 후에 유효함).View 2): 문서\판다View데이터Files\csv
기타 기능
6.1 마우스 단축키
| 왼쪽 버튼 드래그 | 포인트 클라우드 회전 |
| 오른쪽 버튼 드래그 | 확대/축소: 왼쪽으로 끌면 축소되고 오른쪽으로 끌면 확대됩니다. |
| 휠 스크롤 | 확대/축소: 아래로 스크롤하면 축소되고 위로 스크롤하면 확대됩니다. |
| 휠을 누르고 드래그하세요 | 팬 view |
| Shift 및 왼쪽 버튼 드래그 | 주위에 포인트 클라우드를 회전시킵니다. view가는 방향(에서 오는 방향) view좌표의 원점을 가리킨다) |
| Shift 및 오른쪽 버튼 드래그 | 팬 view |
6.2 포인트 클라우드 트랙
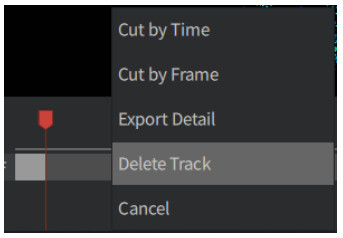
포인트 클라우드 트랙을 마우스 오른쪽 버튼으로 클릭합니다.
| 시간에 따른 컷 | 시작/종료 시간 지정amps, 현재 트랙을 잘라내고 새 .pcap에 저장합니다. file. |
| 프레임별로 잘라내기 | 시작/끝 프레임을 지정하고, 현재 트랙을 자르고, 새 .pcap에 저장합니다. file. |
| 내보내기 세부정보 | 포인트 영역을 선택한 후(섹션 6.3 도구 모음 – 포인트 선택 및 데이터 테이블 참조) 시작/끝 프레임을 지정하고 해당 포인트 클라우드 데이터를 .csv로 내보냅니다. files. · 사용하다 · 이름을 지을 때 fileUbuntu에서는 다음을 포함해야 합니다. file이름 확장자(.csv). |
| 트랙 삭제 | 현재 트랙을 삭제합니다. |
| 취소 | 마우스 오른쪽 버튼 클릭 메뉴를 닫습니다. |
6.3 도구 모음
판다르의 경우View 2 창이 너무 좁아 도구 모음을 모두 표시할 수 없습니다. 마우스 휠을 스크롤하여 view 모든 버튼.
■ 좌표 그리드, 좌표계 및 거리 측정 
| 버튼 이름 | 기능 |
| 데카르 | 30m 간격의 그리드 표시/숨기기 |
| 극선 | 10m 간격의 등거리 원 표시/숨기기 |
| 자 | 두 점 사이의 거리를 측정하려면 왼쪽 버튼을 누른 채 드래그하세요. |
| 좌표 | 직사각형 좌표계 표시 |
■ 투사 모드

| 버튼 이름 | 기능 |
| 정사투영 | – |
| 원근 투영 | – |
■ 포인트 View 그리고 회전
| 버튼 이름 | 기능 |
| 앞/뒤/왼쪽/오른쪽/상단 | – |
| 회전 | 스핀하다 view가는 방향(에서 오는 방향) view좌표의 원점을 가리킴) Z축을 중심으로 |
■ 채널 선택 
딸깍 하는 소리 ![]() (채널) ~ view 또는 현재 표시된 채널을 변경할 수 있습니다.
(채널) ~ view 또는 현재 표시된 채널을 변경할 수 있습니다.
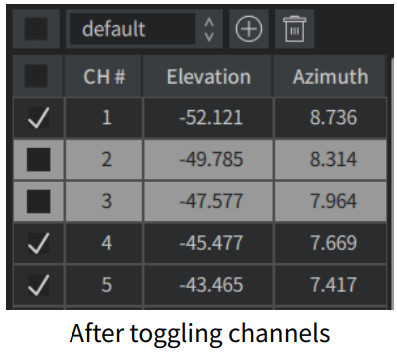
채널 표시 또는 숨기기
- 포인트 클라우드 데이터를 표시하거나 숨기려면 각 채널 왼쪽의 상자를 선택/선택 취소합니다.
- 기본적으로 모든 채널이 표시됩니다.
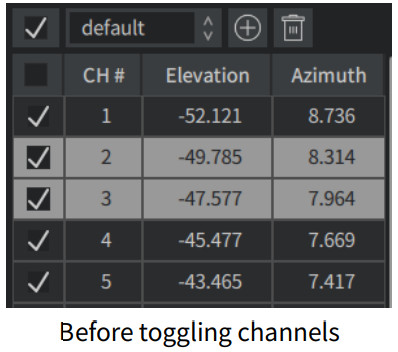
채널 선택 및 전환
- 해당 채널을 선택하고 강조 표시하려면 채널(체크박스 영역 제외)을 클릭하세요.
- 여러 인접 채널을 선택하려면 Shift 키를 누른 채 클릭하세요.
- 여러 개별 채널을 선택하려면 Ctrl 키를 누른 채 클릭하세요.
- 딸깍 하는 소리
 (선택한 채널 전환)을 사용하여 선택한 채널을 선택 및 선택 취소 간에 전환합니다.
(선택한 채널 전환)을 사용하여 선택한 채널을 선택 및 선택 취소 간에 전환합니다.
채널 그룹 저장
- 딸깍 하는 소리
 확인된 채널을 구성으로 저장하고 이름을 지정합니다.
확인된 채널을 구성으로 저장하고 이름을 지정합니다. - Pandar를 다시 시작한 후에도 이전에 저장된 구성이 존재합니다.View 2에서 선택할 수 있습니다.
 드롭다운 메뉴.
드롭다운 메뉴. - 현재 선택한 구성을 삭제하려면
 .
.
■ 포인트 선택 및 데이터 테이블
딸깍 하는 소리 ![]() (선택) 마우스를 드래그하여 포인트 영역을 강조 표시합니다.
(선택) 마우스를 드래그하여 포인트 영역을 강조 표시합니다.
딸깍 하는 소리 ![]() (스프레드 시트) ~ view 아래와 같이 강조 표시된 지점의 데이터를 표시합니다.
(스프레드 시트) ~ view 아래와 같이 강조 표시된 지점의 데이터를 표시합니다. 
필드 제목을 여러 번 두 번 클릭하면 다음 작업이 한 번에 하나씩 수행됩니다.
- 열 너비를 필드 이름에 맞게 조정
(또는 커서가 왼쪽-오른쪽 화살표가 되도록 두 제목 사이에 마우스 커서를 놓고 마우스를 끌어 열 너비를 조정합니다.) - 이 필드를 오름차순으로 정렬합니다. 위쪽 화살표
 오른쪽에 나타납니다.
오른쪽에 나타납니다. - 이 필드를 내림차순으로 정렬합니다. 아래쪽 화살표
 오른쪽에 나타납니다.
오른쪽에 나타납니다. - 정렬을 취소합니다.
왼쪽 상단 모서리에 있는 버튼 그룹:

| 모두 선택 | 이 프레임에 있는 모든 포인트의 데이터를 표시하려면 클릭하세요. 다시 클릭하면 선택한 포인트의 데이터만 표시됩니다. |
| 포인트 정보 내보내기 | 현재 데이터 테이블을 .csv로 내보내기 file. |
| 열 순서 저장 | 현재 필드 순서를 저장합니다. 이 설정은 Pandar를 다시 시작한 후에도 계속 유효합니다.View 2. |
데이터 테이블의 필드는 아래와 같이 정의됩니다.
| Ch | 채널 번호 |
| 아지코르 | 각도 보정으로 보정된 방위각 file |
| 디스트 | 거리 |
| RFL (알에프엘) | 반사율 |
| 아지 | 방위각(로터의 현재 기준 각도) |
| 엘레 | 높이 |
| t | 가장 타임스트amp |
| 필드 | AT 제품군 제품 모델의 경우: 이 측정이 이루어지는 거울 표면입니다. 필드 1/2/3은 각각 거울 표면 0/1/2에 해당합니다. |
| 아지스테이트 | 방위각 상태 각 채널의 발사 시간 오프셋을 계산하는 데 사용됩니다. 특정 LiDAR 모델에만 해당됩니다. |
| 신뢰 | 신뢰 |
■ 기타 디스플레이 제어 
| 버튼 이름 | 기능 |
| 필터 | 포인트 클라우드 표시 범위를 정의합니다. |
| 레이저 트레이싱 | 이 라이더 장치의 레이저 빔을 보여주세요. |
| 상태 정보 | 모터 속도, 복귀 모드, .PCAP 이름 등 포인트 클라우드 표시 영역의 왼쪽 하단에 상태 정보를 표시합니다. file. |
| PCD 덤프 | 현재 프레임을 .pcd(포인트 클라우드 데이터)로 덤프합니다. file 및 지정 file 위치. |
| 컬러 맵 | 포인트 클라우드 표시의 색 구성표를 설정합니다. |
| 포인트 크기 | 데이터 포인트의 표시 크기를 설정합니다. |
| 반환 모드 | 표시할 반품을 선택합니다. |
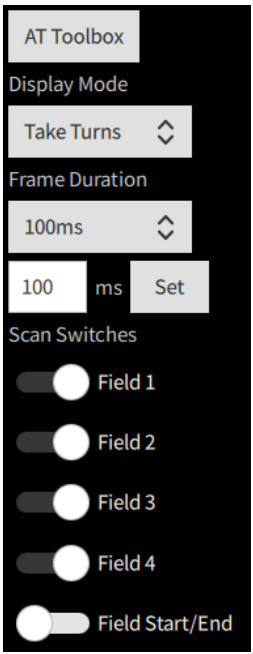
■ AT 제품군 도구 상자
AT 제품군에 속하는 제품 모델의 경우. 
| 디스플레이 모드 | 회전 수행(기본값): 거울 표면 0/1/2의 측정값이 각각 프레임 0/1/2로 출력됩니다. 프레임은 꿰매어지지 않습니다. 조합: Mirror Surfaces 0/1/2의 측정값이 하나의 프레임으로 출력됩니다. 즉, 세 개의 프레임이 하나로 연결됩니다. 전통: Mirror Surfaces 0/1/2의 측정값은 다음에 따라 하나의 프레임으로 출력됩니다. 포인트 클라우드 데이터 패킷의 인코더 각도. 각도 수정은 수행되지 않습니다. |
| 프레임 기간 | 포인트 클라우드 표시 시간 창 시간별 재생 모드(섹션 4.2 재생 제어 참조)에서는 이 시간 창 내의 모든 데이터 포인트가 표시됩니다. |
| 스캔 스위치 | 각 거울 표면의 측정값을 표시하거나 숨깁니다. 필드 1/2/3은 각각 거울 표면 0/1/2에 해당합니다. 필드 4는 사용되지 않습니다. |
| 필드 시작/끝 | 아직 지원되지 않음 |
문제 해결
다음 절차로 문제를 해결할 수 없는 경우 Hesai 기술 지원에 문의하십시오.
| 증상 | 체크 포인트 |
| Lidar 모터가 실행 중이지만 Wireshark나 Pandar에서 출력 데이터가 수신되지 않습니다.View. | 다음 사항을 확인하세요. · 이더넷 케이블이 올바르게 연결되어 있습니다(플러그를 뽑았다가 다시 연결하여). · Lidar의 대상 IP는 설정 페이지에서 올바르게 설정됩니다. web 제어; · 수평 FOV는 방위각 FOV 페이지에서 올바르게 설정됩니다. web 제어; · 센서의 펌웨어 버전이 업그레이드 페이지에 올바르게 표시됩니다. web 제어; · Lidar는 레이저 빛을 방출하고 있습니다. 이는 적외선 카메라, 적외선 센서 카드 또는 적외선 필터가 없는 휴대폰 카메라를 사용하여 확인할 수 있습니다. 전원을 다시 켜서 증상이 지속되는지 확인하십시오. |
| Wireshark에서는 데이터를 수신할 수 있지만 Pandar에서는 수신할 수 없습니다.View. | 다음 사항을 확인하세요. · Lidar 대상 포트가 설정 페이지에서 올바르게 설정되어 있습니다. web 제어 · PC의 방화벽이 비활성화되었거나 해당 PandarView 방화벽 예외에 추가됨 · VLAN이 활성화된 경우 PC의 VLAN ID는 라이다의 ID와 동일합니다. · 최신 PandarView 버전(Hesai 공식 다운로드 페이지 참조) web사이트 또는 Hesai 기술 지원팀에 문의)가 PC에 설치되어 있습니다. 전원을 다시 켜서 증상이 지속되는지 확인하십시오. |
부록 I 법적 고지
Hesai Technology의 저작권 2021. 판권 소유. Hesai의 승인 없이 이 설명서의 일부 또는 전체를 사용하거나 복제하는 것은 금지되어 있습니다.
Hesai Technology는 여기에 포함된 내용과 관련하여 명시적이든 묵시적이든 어떠한 진술이나 보증도 하지 않으며 특히 특정 목적에 대한 보증, 상품성 또는 적합성을 부인합니다. 또한 Hesai Technology는 이 간행물을 개정할 수 있는 권리를 보유하며 그러한 개정이나 변경 사항을 누구에게도 통지할 의무 없이 수시로 내용을 변경할 수 있습니다.
HESAI 및 HESAI 로고는 Hesai Technology의 등록 상표입니다. 이 설명서 또는 Hesai의 공식 웹사이트에 있는 기타 모든 상표, 서비스 마크 및 회사 이름 web사이트는 해당 소유자의 자산입니다.
이 제품에 포함된 소프트웨어에는 Hesai Technology에 등록된 저작권이 포함되어 있습니다. 라이선스 제공자가 명시적으로 허용하거나 해당 법률에서 명시적으로 요구하는 경우를 제외하고 제XNUMX자는 전체 또는 일부를 기반으로 디컴파일, 리버스 엔지니어링, 분해, 수정, 임대, 임대, 대여, 배포, 재라이센스, 파생 작업을 생성할 수 없습니다. 소프트웨어의.
Hesai 제품 보증 서비스 설명서는 Hesai 공식 보증 정책 페이지에 있습니다. web대지: https://www.hesaitech.com/en/legal/warranty
허사이 테크놀로지 주식회사
전화: +86 400 805 1233
Web대지: www.hesaitech.com
주소: 중국 상하이 Hongqiao World Centre L2 빌딩
비즈니스 이메일: info@hesaitech.com
서비스 이메일: service@hesaitech.com