1. 서론
The Denash CANable 2.0 is an open-source USB to CAN analyzer designed to facilitate communication with CAN bus interfaces. It enumerates as virtual serial ports on your computer, acting as a serial line for CAN bus interaction. This device supports CAN2.0A, CAN2.0B, and CAN FD standards, and is compatible with ARM-based embedded platforms such as Raspberry Pi, Raspberry Pi Zero, and ODROID. Its high-performance ARM Cortex M4 processor ensures efficient and stable operation for various CAN analysis tasks.

Figure 1: Denash CANable 2.0 USB to CAN Analyzer Module. This image shows the compact design of the CANable 2.0 module, highlighting its function as an open-source USB to CAN analyzer that creates virtual serial ports for CAN bus communication.
2. 제품 특징
- 다중 표준 지원: Compatible with CAN2.0A, CAN2.0B, and CAN FD standards.
- USB 인터페이스: Equipped with a Type-C USB port for modern connectivity.
- 펌웨어 업그레이드: Supports online firmware upgrade and DFU (Device Firmware Upgrade) mode.
- 고성능 프로세서: Features an ARM Cortex M4 STM32G431C8T6 processor, operating at up to 170MHz for efficient data processing.
- 플랫폼 호환성: Designed for compatibility with ARM-based embedded platforms such as Raspberry Pi, Raspberry Pi Zero, and ODROID.
- Local CAN Interface: Functions as a stable and practical local CAN interface when utilizing CandleLight firmware.
- Virtual Serial Ports: Creates virtual serial ports on your computer for seamless CAN bus interface access.
3. 설정 가이드
3.1 패키지 내용
패키지에 다음 품목이 포함되어 있는지 확인하십시오.
- 1 x Denash CANable 2.0 USB to CAN Analyzer Module
- 1 x USB Cable (USB-A to USB-C)
- 1 x Connecting Cable (Jumper Wires)

Figure 2: Package Contents. This image shows the CANable 2.0 module along with the included USB-A to USB-C cable and a set of jumper wires for connections.
3.2 물리적 연결
- Connect the provided USB-A to USB-C cable to the Type-C port on the CANable 2.0 module and to an available USB port on your computer.
- Identify the CAN interface terminal block on the module. Connect your CAN bus wires (CAN High, CAN Low, and Ground) to the corresponding terminals. Refer to Figure 3 for component identification.
- Ensure proper CAN bus termination (typically 120 Ohm) if the CANable 2.0 is at an end of the bus. The module includes a '120R' short circuit cap for this purpose.

Figure 3: Component Identification. This image highlights key components of the CANable 2.0 module, including the CAN interface (green terminal block), BOOT short cap, Terminal resistant short circuit cap (120R), SWD pins, Power indicator light (PWR), Signal light (WORK/STAT), and the Type C USB port.
3.3 Driver and Firmware Installation
The CANable 2.0 typically requires specific firmware to function as a CAN interface. Two common firmware options are CandleLight and slcan.
- CandleLight Firmware: When using CandleLight firmware, the CANable 2.0 enumerates as a local CAN interface on your operating system (e.g., Linux). This provides a stable and practical CAN interface.
- slcan Firmware: With slcan firmware, the device enumerates as a virtual serial port, allowing communication with CAN bus via serial commands.
Refer to the official CANable documentation or community resources for detailed instructions on flashing the desired firmware and installing necessary drivers for your operating system. Firmware updates can be performed online or via DFU mode.
4. 사용 설명서
4.1 Power On and Status Indicators
Once connected via USB, the Power indicator light (PWR) should illuminate, indicating the device is receiving power. The Signal light (WORK/STAT) will indicate CAN bus activity.
4.2 Using with CandleLight Firmware
If your CANable 2.0 is flashed with CandleLight firmware, it will appear as a native CAN interface. On Linux systems, you can typically interact with it using the ip link 그리고 candump/cansend utilities from the can-utils package. Ensure the CAN interface is brought up and configured with the correct baud rate.
4.3 Using with slcan Firmware
When using slcan firmware, the device will appear as a serial port (e.g., /dev/ttyUSB0 on Linux, COM port on Windows). You can then use a serial terminal program or a CAN analysis tool that supports the slcan protocol to send and receive CAN messages. The slcan protocol defines commands for setting baud rates, opening/closing the CAN channel, and transmitting/receiving frames.
4.4 CAN 버스 통신
Regardless of the firmware, ensure the CAN bus baud rate configured on the CANable 2.0 matches the baud rate of the CAN network it is connected to. Mismatched baud rates will prevent communication.
5. 유지관리
To ensure the longevity and reliable operation of your Denash CANable 2.0 module, follow these maintenance guidelines:
- 청소: Use a dry, soft, lint-free cloth to clean the module. Avoid using liquid cleaners, solvents, or abrasive materials.
- 저장: Store the device in a cool, dry, and dust-free environment when not in use. Keep it away from direct sunlight and extreme temperatures.
- 손질: Handle the module with care to prevent physical damage. Avoid dropping it or subjecting it to excessive force.
- 환경 보호: Protect the device from moisture, humidity, and corrosive substances.
6. 문제 해결
If you encounter issues with your CANable 2.0 module, refer to the following troubleshooting steps:
6.1 장치가 인식되지 않음
- USB 연결 확인: Ensure the USB cable is securely connected to both the CANable 2.0 and your computer. Try a different USB port or cable.
- 운전자 확인: Confirm that the necessary drivers for the virtual serial port or CAN interface are correctly installed on your operating system.
- 전원 표시기: Check if the PWR indicator light is on. If not, the device may not be receiving power.
6.2 No CAN Communication
- CAN Bus Wiring: Double-check the CAN High (CANH), CAN Low (CANL), and Ground (GND) connections to the CAN bus. Ensure they are correctly wired.
- 통신 속도 불일치: Verify that the baud rate configured for the CANable 2.0 matches the baud rate of the CAN network.
- 종단 저항: Ensure proper 120 Ohm termination resistors are present at both ends of the CAN bus. The CANable 2.0 has an onboard option for this.
- 펌웨어 확인: Confirm that the correct firmware (CandleLight or slcan) is flashed and properly configured for your application.
6.3 펌웨어 업데이트 문제
- DFU 모드 : Ensure the device is correctly put into DFU (Device Firmware Upgrade) mode before attempting a firmware flash. Refer to specific firmware documentation for this procedure.
- Software/Tool: Use the recommended flashing tool and firmware file for your specific CANable 2.0 version.
7. 사양
The following table details the technical specifications of the Denash CANable 2.0 USB to CAN Analyzer Module:

Figure 4: Module Dimensions. This image displays the physical dimensions of the CANable 2.0 module, including its length (45mm / 1.77in), width (16mm / 0.63in), and height (10.5mm / 0.41in) of the terminal block. It also shows the mounting hole pattern with a diameter of 2.2mm / 0.09in.
| 특징 | 사양 |
|---|---|
| 상표 | 데나쉬 |
| 모델 번호 | Denashoxtec2m9f4 |
| 마이크로프로세서 | For STM32G431C8T6 (ARM Cortex M4) |
| 프로세서 속도 | 최대 170MHz |
| Communicating Chip | For TJA1051T/3 |
| 권tage | 직류 3.3V-5V |
| CAN Standards Supported | CAN2.0A, CAN2.0B, CAN FD |
| 펌웨어 지원 | CandleLight, slcan |
| Data Transfer Rate (CAN) | 1M, 2M, 5M (Megabits Per Second) |
| ESD 보호 | 30kV |
| 하드웨어 인터페이스 | USB 타입-C |
| 호환 장치 | Single-Board Computer (e.g., RasPi, ODROID) |
| 호환되는 OS 제품군 | 리눅스 |
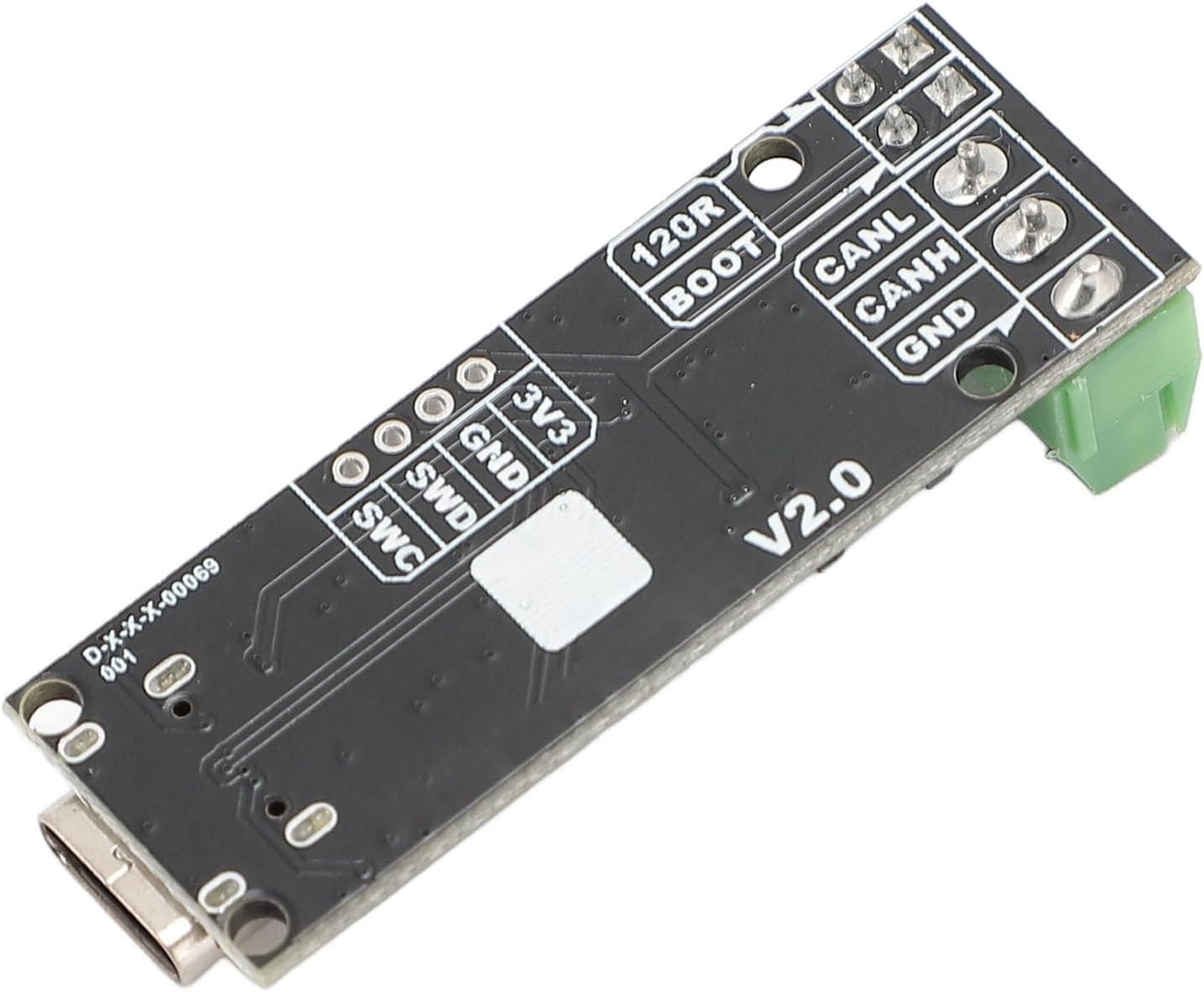
Figure 5: Pinout Diagram (Bottom View). This image details the pinout labels on the underside of the CANable 2.0 module for SWD (SWD, SWC, GND, 3V3) and CAN (CANL, CANH, GND) connections.
8. 보증 정보
This Denash product is covered by a standard manufacturer's warranty. Please refer to the product packaging or the seller's terms and conditions for specific warranty duration and coverage details. The warranty typically covers defects in materials and workmanship under normal use.
9. 지원
For technical assistance, troubleshooting, or further inquiries regarding your Denash CANable 2.0 USB to CAN Analyzer Module, please contact the retailer or manufacturer directly. You may find additional resources and community support online for open-source CANable devices.